
可控核聚变实现,可以让人类文明开启第四次工业革命,但要想进入星际文明时代,还必须有能自由穿梭于宇空的交通工具。就如火车发明的重要性之于第一次工业革命,若第四次工业革命没有一种更高效便利的交通工具让人类穿梭于地面与太空,仍只是沿用火箭通过燃烧化学燃料这种高耗低效的运输手段穿越太空,那这个工业革命也是会显得暗淡无光。因此,这里介绍一种全新运动模式下的空间飞行器原理,以作为第四次工业革命的星际交通工具的制造指导思想:碟形空间飞行器。
碟形空间飞行器,即简称的飞碟,在科幻片里被描绘为外星人或未来人类穿梭于宇宙空间的便利交通工具,是人类向往的一种高效高速低耗低污染的星际旅行方式。也在日常中报道有人类发现过疑似外星飞碟光临地球,只是人们对这种碟形结构的飞行器的运转模式不明就里,于是无法深入理解这一未来科技。这里用以太论来解析这种飞行器的运转原理,由此人类将能摆脱地球万有引力的禁锢,实现自由遨游星空的梦想。

这种飞行器所依赖的核心技术主要是超导技术、可控核聚变。其它的如现代飞机要用到的各种技术如设计、控制、信息处理、光学等等,都是需要的,就不例举。所有技术依托的原理,都是《广义时空论附录上·万物意志篇》纠正西方科学理论体系后的解析认识。
这里介绍的碟形空间飞行器原理,包括构架技术原理与运动技术原理。运动技术原理又包括悬浮技术原理,平动技术原理,升降技术原理。其它如材料合金、内部线路布局、电脑控制等等技术则不会讲,在于这些技术,已经相对成熟,并广泛地在现代航空器上应用,直接参照就可以了。同时,这些原理都是简略描述,更齐全更实用的技术细则需在实践中完善,并不是这里可以表述的。
这里,可以先用一句话来概括碟形空间飞行器原理,就是:
碟形空间飞行器在空泡状态下的曲直动量转换。
构架原理
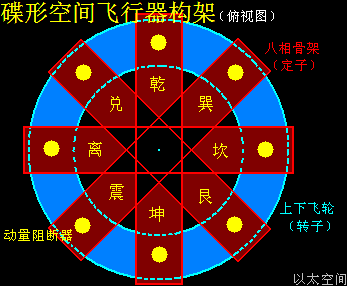
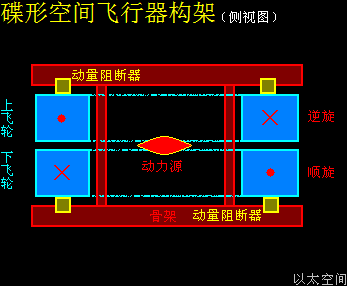
碟形空间飞行器的硬件构架,就如飞机有机身机翼发动机等构件,碟形空间飞行器的主要构件包括碟壳,动力源,动力飞轮,骨架,平衡飞轮,门,动量阻断器。
碟壳:即飞碟的外壳,起到提供活动、容纳场所与分割内外空间的作用,是一个偏平碟状的圆形结构,是“飞碟”这一称呼的源由。碟壳由强合金材料构成,上布满超导线网。
动力源:即飞碟的心脏,是一个可控核聚变反应堆,为整个碟体直接提供电力,用来驱动碟体与其它照明、通讯等等能源之用。
动力飞轮:分上下两片,同轴旋转,方向相反。能将动力源提供的电力转换成正反角动量,也即曲动量。具体旋转驱动方式与日常中的电动机驱动方式相近。

八相骨架:是作为飞碟的龙骨支撑之用,主体是八个相位的双层相互联结的“米”字型框架结构。
平衡飞轮:也分上下两片,同轴旋转方向相反,用来平衡动力飞轮的角动量的。动力飞轮虽是上下对称,同轴旋转方向相反,角动量大小基本相同,但在实际运行中仍有偏差,会导致整个碟体旋转,于是用平衡飞轮来平衡这种偏差,可以让整个碟体稳定不旋转。同时,平衡飞轮用来控制碟体侧向偏转,可以斜角飞行。
门:出入碟体与外界的通道,分上下两个口,处在碟体中心的两侧壳端。
动量阻断器:固定在骨架上,连接着骨架与上下飞轮,用来阻断动力飞轮的曲动量与碟体的直动量,可以将曲动量转换为直动量,或将直动量转换为曲动量。这是碟体能前进、停止、转弯的关键装置。动量阻断器分开启与闭合两种状态,开启状态即为不与动力飞轮产生力的作用,闭合状态即为与动力飞轮产生力的作用,作用有点象刹车片。

悬浮原理
当下人们发明的飘升机,可以在空气或真空环境上下飘升,可以悬浮在空中,碟形空间飞行器,应用的就是这一技术发现与原理。这是通过碟壳上下表面布满方向各异的超导线网来实现的。
当碟壳表面的超导线网通上交变电流以后,产生次生以太旋涡,即强磁场。由于导线方向不同与电流方向、强度变化,导线的磁场间相互之间会排斥,也即以太涡流相冲作用,从而在碟体周边空间形成以太湍流层。碟体与周边空域形成一个以碟体为中心,由以太湍流层环绕包裹的时空气泡结构。这个时空气泡的外沿,是碟体以太湍流层与星球以太旋涡、星球表面以太湍流层的力的作用平衡处。

就如空气气泡由于密度小在水里会上升,或人们知道在离心机溶液里,密度比溶液小的物质会出现离心现象而远离中心,这个由碟体与以太湍流层构成的时空气泡,整体密度可以比星球空间的以太旋涡密度小,于是就能飘起来,通过控制碟壳表面的超导线网里的电流,就可以控制碟形空间飞行器处于上下飘浮、或悬浮状态。
这个以太湍流层,强度升高后,能够偏折光线、吸收电磁微波,于是可以让整个碟形空间飞行器处于可见光隐身状态,或不被雷达探测。
碟形空间飞行器悬浮原理描述为一句话就是:
在碟体表面带上超高振荡磁场,形成时空气泡,从而让飞碟飘升与悬浮

移动原理
这里先将碟体八相骨架的八个相位标记为八个符号:
乾、巽、坎、艮、坤、震、离、兑
当然也可以用A、B、C、D或东、南、西、北等等方式表示。因为这个碟形空间飞行器原理是太极八卦图的具像应用,所以采取八卦名称来标记。八相骨架分上下两层,有两组共十六个相位:上乾位、下乾位、上巽位、下巽位、上坎位、下坎位、上艮位、下艮位、上坤位、下坤位、上震位、下震位、上离位、下离位、上兑位、下兑位。
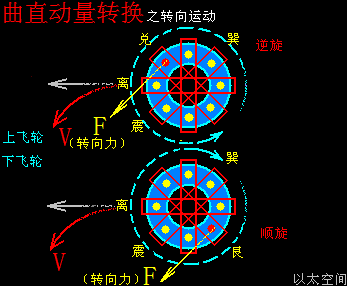
碟形空间飞行器在地表空间或宇宙空间里飞行,运动有加速、减速、转向、上升、下降、斜飞等等状态。这些运动状态,是通过上下飞轮来提供曲动量,再通过控制动量阻断器,将曲动量转换为直动量,及将直动量转换为曲动量,最后通过控制平衡飞轮来调整姿态,来实现改变的。这种曲直动量相互转换,一点都不违背动量守恒原理及角动量守恒原理。人们不能发现疑似外星来客的飞碟的运动模式,就在于忽略了动量守恒原理其实还有第三种形式:曲直动量守恒。
上下飞轮,在可控核聚变反应堆产生的电力驱动下,产生超高速旋转。两飞轮结构一致,同轴旋转,旋转方向互为顺逆,角动量大小基本相同。下面以上飞轮逆旋,下飞轮顺旋为例说明运动原理。
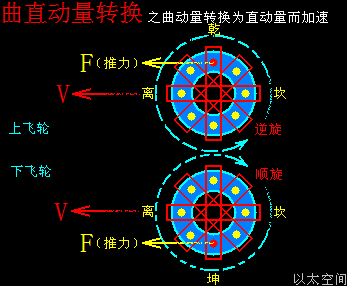
1、加速运动
加速运动即静止、低速向运动、高速转变。以沿离位方向移动为例,碟形空间飞行器处于悬停状态,上飞轮与下飞轮互为顺逆高速转动,上下门均闭合,动量阻断器处于开启状态。上飞轮侧骨架的乾位动量阻断器闭合,对上飞轮产生一个阻力;同时,下飞轮侧骨架的坤位动量阻断器也闭合,对下飞轮产生一个阻力。如此,上飞轮会将部分角动量传递给动量阻断器,会在骨架上乾位产生离位指向的推进力;下飞轮也会将部分角动量传递给动量阻断器,会在骨架下坤位也产生离位指向的推进力,如此,两个飞轮对碟体产生离位方向的推进合力,于是碟体向离位方向加速运动。
同时,由于作用力与反作用力的关系,闭合的两个动量阻断器对上下飞轮在上乾位与下坤位分别产生坎位方向的阻力,与飞轮在这两个相位的切向速度方向相反,于是对上下飞轮都产生减速旋转作用。
这就是曲动量转换为直动量的原理。
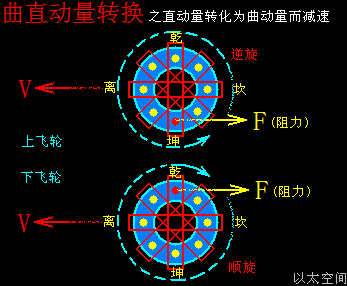
2、减速运动
减速运动,即高速、运动向低速、静止转变。以离位运动方向的减速运动为例,碟形空间飞行器处于高速直线飞行状态,方向为离相位指向,上飞轮与下飞轮互为顺逆高速转动,上下门均闭合,动量阻断器处于开启状态。上飞轮侧骨架的坤位动量阻断器闭合,会在八相骨架上坤位处产生一个坎位方向的阻力;同时,下飞轮侧骨架乾位动量阻断器也闭合,会在八相骨架下乾位处也产生一个坎位方向的阻力。如此,两个飞轮对碟体产生坎位方向的阻进合力,于是碟体在离位方向产生减速运动。
同时,上下飞轮轴的离位方向直行速度与碟体同步减速,于是在惯性作用下,上乾位飞轮直切动量沿上飞轮逆旋圆周,逐渐转换为上飞轮角动量;下坤位飞轮直切动量沿下飞轮顺旋圆周,也逐渐转换为下飞轮的角动量,于是上下飞轮都产生加速旋转作用。
这就是直动量转换为曲动量的原理。
3、转向运动
转向向运动,即运动改变方向。以离位运动方向的转向运动为例,碟形空间飞行器处于高速直线飞行状态,方向为离相位指向,上飞轮与下飞轮互为顺逆高速转动,上下门均闭合,动量阻断器处于开启状态。上飞轮侧骨架的兑位动量阻断器闭合,在八相骨架上兑位处产生一个震位方向的偏向力;同时,下飞轮侧骨架艮位动量阻断器也闭合,在八相骨架下艮位处也产生一个震位方向的偏向力。如此,两个飞轮对碟体产生震位方向的偏向合力,于是碟体从原离位方向改为沿震位方向运动。
同时,由于作用力与反作用力的关系,闭合的两个动量阻断器会对上下飞轮在上兑位与下艮位分别产生巽位方向的作用力,这个作用力对上下飞轮产生加速还是减速旋转作用,由闭合转向瞬间的碟体运动速度与闭合时的作用力大小等因素决定,一般理解是离位方向的直动量转化为上下飞轮的曲动量,而上下飞轮的部分曲动量转换为震位方向的直动量。
这就是直动量与曲动量相互转换的原理。
其它对称相位的动量阻断器闭合也是一样运作原理,于是就可以控制碟形空间飞行器向八个相位的方向上前行或转向。这种转向会产生“Z”字形的运动轨迹,而不是当下飞机通过尾舵偏转下的圆弧形的运动轨迹。在不同运动状态下,再通过不同相位动量阻继器的开闭,可以让飞碟在空中产生前进、骤停、折向、反向等等运动状态的改变。
4、升降运动
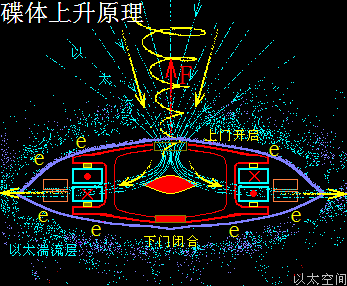
虽然通过飘升机方式除了可以悬浮在空中之外,还可向上飘升与往下降落,但这种上升与下降仅依赖星球重力与碟体浮力之间的对比关系,一是速度太低,二是自主性太差,因此这里提供另一种主动式上升与下降运动模式,这是通过控制上下门开启与闭合来实现的。
在星球表面上空飞行的碟形空间飞行器,若打算上升,让碟体的上门处于开启状态,下门处于闭合状态,由于碟体内部有上下飞轮在高速旋转,会让碟体内部空间的以太有向外围扩散的趋向,当上门开启下门闭合,碟体周边空间的以太会从上门被吸入碟体,后从碟体圆周面排出,这一过程会在碟体中心上方产生向上的吸力,从而让碟体快速上升。
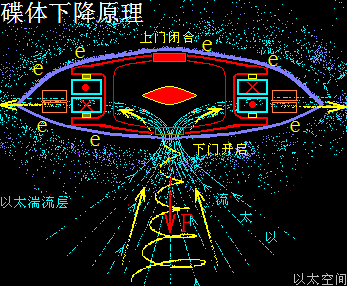
同样,在星球表面上空飞行的碟形空间飞行器,若打算下降,让碟体的下门处于开启状态,上门处于闭合状态,如此,碟体周边空间的以太会从下门被吸入碟体,后从碟体圆周面排出,这一过程会在碟体中心下方产生向下的吸力,从而让碟体快速下降。
无论上升还是下降,被吸入的以太流会在碟体中心外围的上方或下方形成如龙卷风般的以太涡旋,若在空气中,会牵引空气形成小型龙卷风。
5、斜飞运动
斜飞运动,即碟形空间飞行器轴侧向飞行,这是通过控制平衡飞轮的偏向角度来达到整个碟体侧向偏转的形态,由于简单,就不说明。
太极八卦图,是一个碟形空间飞行器结构原理图:
太极形象,是高速旋转的上下飞轮构架;八卦形象,是八个相位的骨架结构。太极形象,也是碟形空间飞行器的整体构架;八卦形象,也是这个碟形空间飞行器周边空间的以太振动状态描绘,即以太湍流的运动形象。
